Приход совершенного андроида: для него уже создана рука
Приход совершенного андроида: для него уже создана рука
Фантастика стала еще на один шажок ближе к реальности. Новая рука для робота - это замечательный пример комбинации принципов биомиметики и мехатроники. Увидев ее, кто-то непременно вспомнит Терминатора, но изобретение должно найти массу мирных областей применения.
Германская компания Festo специализируется на электронных, электрических и пневматических узлах для роботов и различного промышленного оборудования. Теперь, покопавшись в закромах, она создала манипулятор, поражающий и видом, и возможностями, сообщает Membrana.ru.
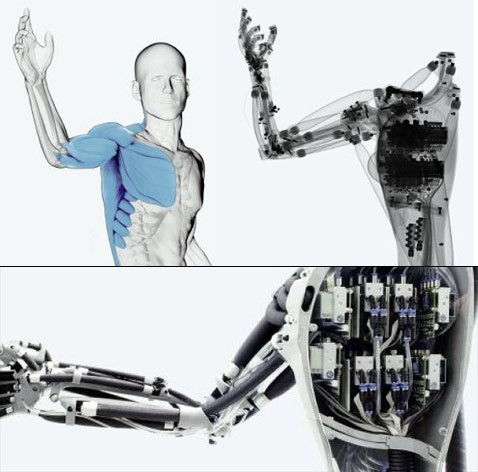
Инженеры и раньше нередко сравнивали свои творения - манипуляторы для андроидов - с руками человека, но здесь это сравнение, пожалуй, впервые, подходит без преувеличения. В новом проекте изобретатели максимально близко воспроизвели в металле, резине и пластике анатомические особенности человеческих руки и части торса.
{kind=link}
Называется это творение Airic's_arm. Это рука и прилегающий "кусок" спины (кстати, компания создала не один образец данной машины). Габариты Airic's_arm, когда рука распрямлена, составляют 85×85×65 сантиметров. А вес ее равен всего-то 6,3 килограмма.
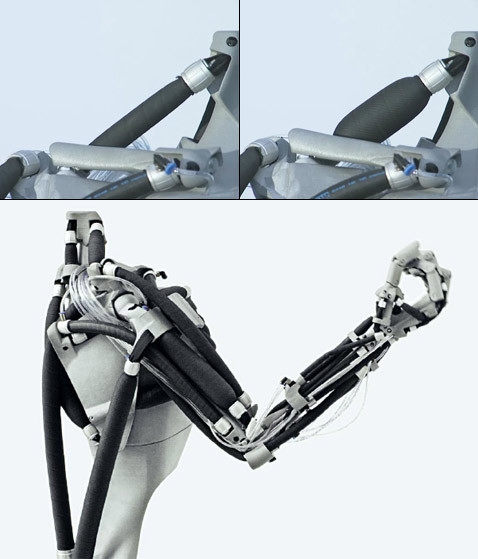
Главным достоинством разработки германские специалисты считают её приближение к руке человека в плане точности движений, динамики и мощности. Секрет же новинки - в так называемых "Жидкостных мускулах" (Fluidic Muscle).
Вопреки названию, мускулы эти (правильнее было бы назвать их актуаторами) работают от сжатого (до 6-8 атмосфер) воздуха. Состоят они (упрощенно) из отрезков эластомерных шлангов, армированных арамидными волокнами.
При подаче давления они раздуваются вширь (поскольку в длину из начального, сдутого, состояния они вытянуться не могут) и одновременно сокращаются, словно настоящие мышцы.
Примерно такой тип актуаторов (в том или ином варианте) изобретатели придумывали и строили не раз, но Festo полагает, что именно она довела конструкцию искусственных пневматических мускулов до совершенства. Фирма выпускает целую линейку таких устройств, отличающихся размерами и силой, а предназначены они для работы в качестве приводов в самом разном оборудовании.
{kind=link}
По сравнению с электрическими приводами, равно как и с пневматическими или гидравлическими цилиндрами, такие мускулы не могут обеспечить высоких скоростей движения или дальности перемещения соединяемых деталей, зато обладают рядом иных сильных сторон.
Сила, в буквальном смысле, - одна из них. Мышцы длиной несколько сантиметров могут развивать усилие в десятки килограммов, а иные модели - и в сотни. Вес их при этом куда меньше, чем у любого иного типа привода сравнимой силы.
Система управления может менять "напряжение" таких мышц до 100 раз в секунду, и никакой инерционности в движении они не проявят. Пусть скорость перемещения деталей, соединенных такой робототехнической мышцей, не очень велика, зато Fluidic Muscle может развивать ускорение до 100 м/c2.
Сокращается Fluidic Muscle на 10-20% от своей начальной длины, то есть - на считанные сантиметры. Но вспомните: мускулы человека, скажем, той же руки, прикреплены к костям вблизи суставов. И эти мускулы также отличаются сравнительно небольшим перемещением своих концов, зато развивают приличное усилие. А уж геометрия скелета обеспечивают в результате требуемое (быстрое и большое по размаху) движение конечности.
{kind=link}
Вот и в новом роботе инженеры Festo пошли по тому же, проторенному природой, пути. Они решили сделать вот что: взяв несколько давно выпускаемых компанией "робо-мускулов", построить максимально близкое подобие руки человека. Близкое и по общим пропорциям, и по размерам, и по анатомии.
В руке Airic's_arm ее авторы воссоздали в металле и пластике практически все кости руки и плеча человека, включая лопатку (впервые в технике, утверждает компания), и даже кисть с пятью пальцами (по составным деталям аналогичными настоящим) и все положенные этой структуре суставы.
А приводят эту систему в движение Fluidic Muscle числом 32 штуки! Это приблизительно вдвое меньше, чем в настоящей руке и плечевом поясе, но все равно - впечатляет.
Искусственные мускулы в новом роботе подражают в размерах и по расположению настоящим мышцам: сгибателям пальцев, мышцам ладони, бицепсу, трицепсу, грудным мышцам, дельтовидной мышце и так далее.
К этому набору создатели робота добавили быстродействующие и высокоточные пьезокерамические клапаны и новый софт. Развиваемая сила и перемещение составных частей руки постоянно измеряются встроенными датчиками перемещения (всего их тут шесть) и давления воздуха (они индивидуальны для каждого мускула).
{kind=link}
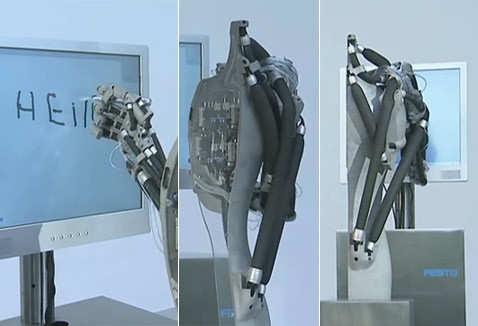
Так получилась удивительная рука, которую с человеческой, конечно, не спутаешь, но ее облик все равно вызывает в памяти картинки из анатомического атласа. И действует она точнее и натуральнее (по движениям) большинства рук для роботов, созданных ранее другими фирмами.
Ее разработчики намерены и дальше развивать этот проект. Найденный принцип, пишут они, позволит в будущем создать аналогичные робототехнические шеи, ноги, а после оснащения таких конечностей тактильными датчиками и видеокамерами можно будет строить гуманоидных роботов с выдающимися возможностями.
Да и негуманоидные машины также смогут извлечь из этой технологии выгоду. Ведь никто не мешает конструкторам воспроизвести в металле (с теми же ингредиентами, что и в Airic's_arm) какое-нибудь земное животное или даже придумать фантастическое.
http://www.point.ru/techno/2007/08/30/10349
Интересно почитать